
Engagement variants
| P. no. |
Parameter name Setting |
Figure | Function |
|---|---|---|---|
| P 0253 |
MPRO_ECAM_Egear_GearIn_MOD |
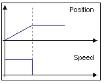
Master = black curve Engagement distance (dotted line) |
Engage mode |
| (0) | Direct |
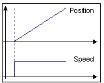
|
Direct engagement: - angle-synchronous - collisional (no ramps) |
| (1) | ramp |
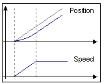
|
Engagement with linear acceleration profile: - not angle-synchronous - jerked |
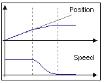
| (2) | fade |
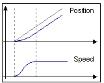
|
Engagement with fade-in function - not angle-synchronous - jerk limited - The position is ignored. There always remains a variation between reference and actual position. |
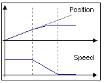
| (3) | crossfade |
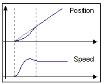
|
Engage with cross-fade function (5th order polynomial) - angle-synchronous - jerk limited - Speed overshoots during engagement. |
| P 0255 | MPRO_ECAM _Egear_GearIn_Acc | Acceleration ramp | |
| P 0257 | MPRO_ECAM _Egear_GearIn_Dist | Engagement distance: The actual engagement takes place within the engagement distance (dotted line). |
Tabelle: Engagement variants
| P. no. |
Parameter name Setting |
Figure | Function |
|---|---|---|---|
| P 0254 |
MPRO_ECAM_Egear_GearOut_MOD |
Master = black curve Engagement distance (dotted line) |
Disengage mode |
| (0) | Direct |
|
Direct disengagement: - collisional (no ramps) |
| (1) | ramp |
|
Disengagement with linear acceleration profile: - jerked |
| (2) | fade |
|
Disengagement with fade-out function - jerk limited |
| P 0256 | MPRO_ECAM _Egear_GearOut_Acc | Braking ramp | |
| P 0258 | MPRO_ECAM _Egear_GearOut_Dist | Disengagement distance: - collisional (no ramps) |
Tabelle: Engagement mode

|
NOTE: The actual engagement takes place within the engagement distance (dotted line). This area can be set separately for acceleration and braking. |
Copyright © LTi DRiVES GmbH, Januar 2013, ID-Nr.: 0842.26B.1-00 DE